1 リアクションホイール:姿勢制御のトルク源
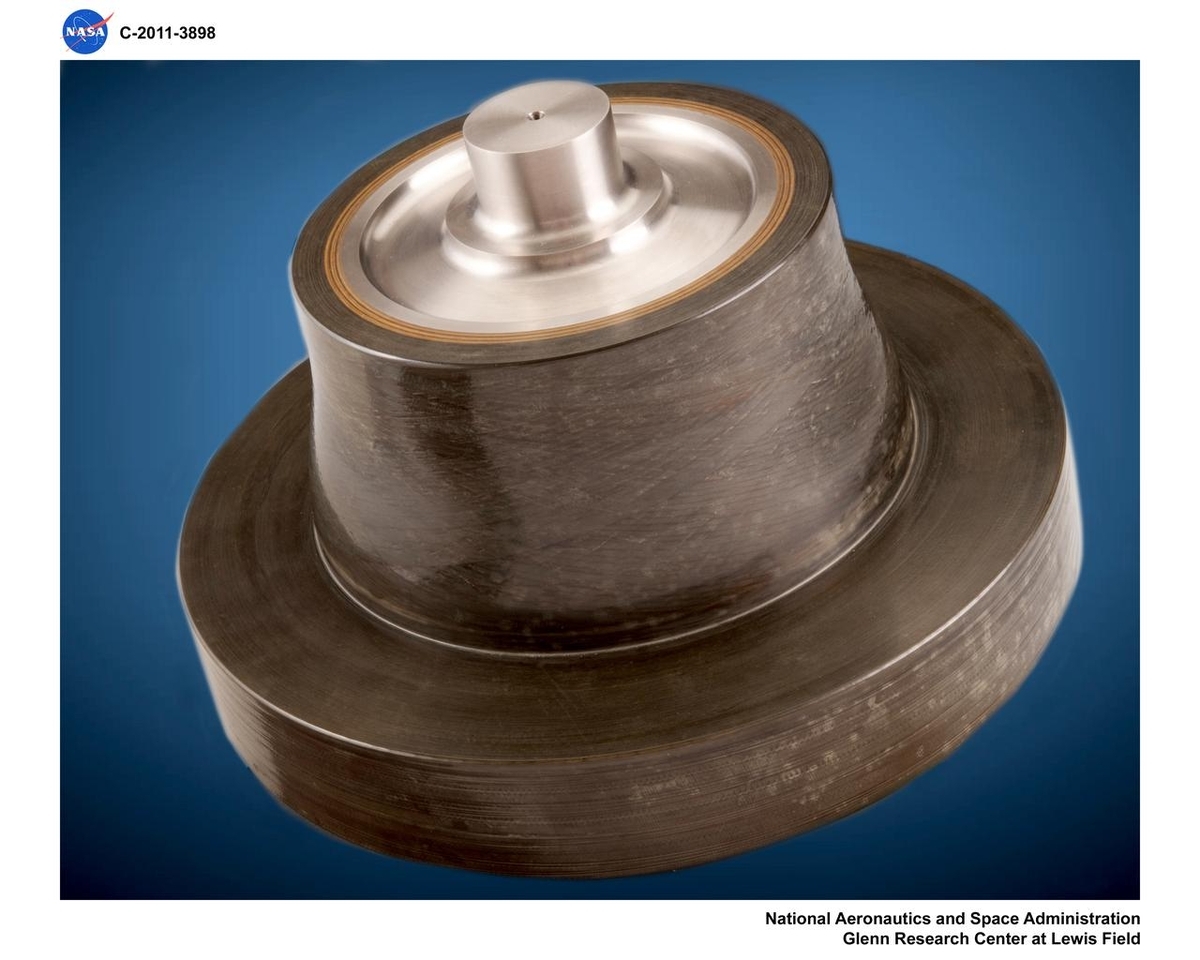
リアクションホイールは、人工衛星の姿勢を制御するためのトルク生成装置である。内部に搭載されたフライホイールを高速回転させ、その角運動量を変化させることで、衛星本体に反作用トルクを与える。これはニュートンの第三法則に基づくものであり、ホイールの回転速度を調整することで、衛星の向きを微細に制御できる。
主な構成要素
-
フライホイール(高精度バランス)
-
ブラシレスDCモーター
-
軸受け(磁気軸受けまたは機械軸受け)
-
回転センサー(エンコーダ)
技術的課題と設計上のヒント
| 課題 | 内容 | 設計上のヒント |
|---|---|---|
| 摩耗 | 長期運用で軸受けが摩耗し、振動や回転不均衡が発生 | 摩耗試験と寿命予測モデルの活用 |
| 飽和 | 回転速度が限界に達すると姿勢制御が不能になる | デサチュレーション(磁気トルカ等を用いたアンローディング)機構の設計 |
| 熱 | 高速回転により発熱し、周辺機器に影響 | 放熱経路の確保と熱設計との連携 |
| 振動 | 微小な不均衡が画像取得や通信に悪影響 | ダンパーやアイソレーターによる振動吸収構造の導入 |
冗長系の導入(3軸+1予備)が一般的であり、姿勢制御の継続性を確保するための基本設計として推奨される。
2 スタートラッカー:姿勢検出の光学基準
スタートラッカーは、宇宙空間で見える恒星の位置を撮影・解析することで、衛星の姿勢(オイラー角)を高精度に算出する光学センサーである。恒星の位置は極めて安定しており、絶対姿勢の基準として利用される。
主な構成要素
技術的課題と設計上のヒント
| 課題 | 内容 | 設計上のヒント |
|---|---|---|
| ノイズ | 放射線や熱によるセンサーのノイズが星像検出を妨げる | 異常検知アルゴリズムの導入とセンサー選定 |
| キャリブレーション | レンズの歪みや温度変化による視野誤差 | 温度依存性の補正と定期キャリブレーション設計 |
| 太陽干渉 | 太陽光が直接入射するとセンサーが飽和 | バッフル設計とサンアボイダンス角の設定 |
| 処理遅延 | 星像処理に時間がかかるとリアルタイム制御に支障 | 高速処理アルゴリズムと処理能力の最適化 |
軌道に応じた星カタログの最適化も、検出精度と処理効率の両立に寄与する。
3 比較表:リアクションホイールとスタートラッカー
| 項目 | リアクションホイール | スタートラッカー |
|---|---|---|
| 役割 | 姿勢の制御 | 姿勢の検出 |
| 原理 | 角運動量の反作用 | 恒星の位置解析 |
| 主な課題 | 摩耗・飽和・熱 | ノイズ・キャリブレーション・太陽干渉 |
| 対策 | 冗長化・熱設計・振動吸収 | 遮光設計・温度補正・星カタログ最適化 |
4 姿勢誤差と地表面のズレの関係
人工衛星が地球を観測する際、光学センサー(カメラ、望遠鏡など)は特定の地表面を正確に指向する必要がある。衛星の姿勢がわずかにズレるだけで、センサーの視野(Field of View, FOV)が地表で大きくずれることがある。
基本関係式(近似)
基本関係式(近似) 地表面でのズレ距離 D は以下で近似されます。
D = h * theta
(※ theta はラジアン単位。微小角では tan(theta) ≒ theta となるため)
-
:衛星の高度(例:500 km)
-
:姿勢誤差角(ラジアン)
5 姿勢誤差と地表ズレの具体例(高度500km)
| 姿勢誤差角 | 角度(度数法) | 地表面でのズレ距離 (D) | 備考 |
| 1 arcsec | 約 0.00027° | 約 2.4 m | 最新鋭・高分解能衛星の要求水準 |
| 3.6 arcsec | 0.001° | 約 8.7 m | 中解能衛星のポインティング目標 |
| 36 arcsec | 0.01° | 約 87.3 m | 一般的な地球観測衛星の基準値 |
| 360 arcsec | 0.1° | 約 872.7 m | 低分解能/地磁気センサ級 |
| 1,800 arcsec | 0.5° | 約 4.36 km | 粗い姿勢制御ミッション |
| 3,600 arcsec | 1.0° | 約 8.73 km | 小型実験機等の初期段階 |
| 7,200 arcsec | 2.0° | 約 17.45 km | 姿勢喪失/セーフモードに近い状態 |
6 光学センサーの分解能との関係
高分解能の地球観測衛星では、1 m以下の地上分解能を持つセンサーも存在する。これらのセンサーでは、0.01°(約36 arcsec)以上の姿勢誤差でも、以下のような影響が発生する:
-
画像のぼやけ(motion blur)
-
ターゲット逸脱(指定地点を外して撮影)
-
ステレオ観測の失敗(視点不一致)
-
地図作成精度の低下(ジオリファレンス誤差)
7 姿勢制御設計への示唆
| 要求精度 | 推奨される技術対応 |
|---|---|
| 0.01°以下 | 高精度スタートラッカー、リアクションホイールの振動抑制、光学系の熱安定化 |
| 0.1°程度 | センサー融合(ジャイロ+地磁気)、フィルタリング処理、撮影タイミング補正 |
| 1.0°以上 | 太陽センサーや地磁気センサー中心の設計でも許容可能(低分解能ミッション) |
8 姿勢制御技術の本質:精度を支える設計者の思考
リアクションホイールとスタートラッカーは、宇宙機の姿勢制御を担う「制御」と「検出」の両輪であり、衛星が宇宙空間で正しく向き続けるための根幹を支えている。これらの装置は、単なる部品ではなく、設計思想の集約点である。
リアクションホイールは、摩耗・振動・熱といった物理的課題を抱えながらも、静粛かつ連続的な姿勢制御を可能にする。その信頼性は、軸受けの選定、熱設計との連携、冗長系の構成、そして寿命予測モデルの精度にかかっている。
スタートラッカーは、恒星という宇宙で最も安定した基準を用いて、絶対姿勢を高精度に測定する。しかし、光学系の熱安定性、太陽干渉、ノイズ耐性、処理遅延といった環境要因に敏感であり、設計者には光学・熱・アルゴリズムの統合的な視点が求められる。
さらに、姿勢誤差が地表面で数キロメートルのズレを生むことを考えれば、これらの装置の設計精度がミッション全体の成果を左右することは明らかである。高分解能観測衛星では、0.01°以下の精度が求められることもあり、熱設計、振動対策、センサー融合、ソフトウェア補正など、複数の技術を統合する設計力が問われる。
姿勢制御とは「この衛星は、どこを、どれだけ正確に、どれだけ長く向き続けるべきか。」を考え続けなければならない。
出典情報(技術解説)
-
NASA NTRS (Reaction Wheel Reliability)
https://ntrs.nasa.gov/citations/20090029332 -
ECSS (Star Tracker Sensors Standard)
https://ecss.nl/standard/ecss-e-st-60-20c-star-sensors-terminology-and-performance-specification/ -
JAXA 姿勢制御系技術解説(室田氏)
https://ssl.tksc.jaxa.jp/murota/shisei/shiseicontrol1.pdf
|
|
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/1cd3468d.0c08f3fc.1cd3468e.10b04370/?me_id=1213310&item_id=21784854&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Fbook%2Fcabinet%2F8547%2F9784910558547_1_3.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")

|
|
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/4f2cac34.c853a13e.4f2cac35.1aea3088/?me_id=1356830&item_id=10006906&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Fexicoast02%2Fcabinet%2F12540646%2Fimgrc0110526810.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")